研究分野
対人支援ロボットに関する研究
知能ロボットシステム研究室
担当教員:生命工学領域 助教 李沛譲
本研究室では装着型アシストロボットスーツの開発、対人移動支援ロボット、自律移動ロボットの開発、脳波によるパワーアシスト技術の開発の4つのテーマを研究しております。ロボット技術を用いて社会問題となっている人手不足の解消や負担軽減に貢献できることを目指しています。
主な研究成果
本研究室では、人への支援を目的とした以下の4つのテーマに取り組んでいます。
(1) 装着型アシストロボットスーツの開発
作業者の身体負担軽減を目的として、腰パワーアシスト装置の開発を行っています。機構設計では装着違和感や動作抵抗を抑える工夫を施しており、制御技術としてはセンサレス・モデルベース制御を研究しています。
(2) 自律移動ロボットの開発
屋外では、既存のトラクタに後付け可能な自動運転装置を開発し、GPSを活用した自律移動システムを構築しています。屋内においては、物流現場での高速走行に対応可能な自律移動ロボットの開発を行っています。
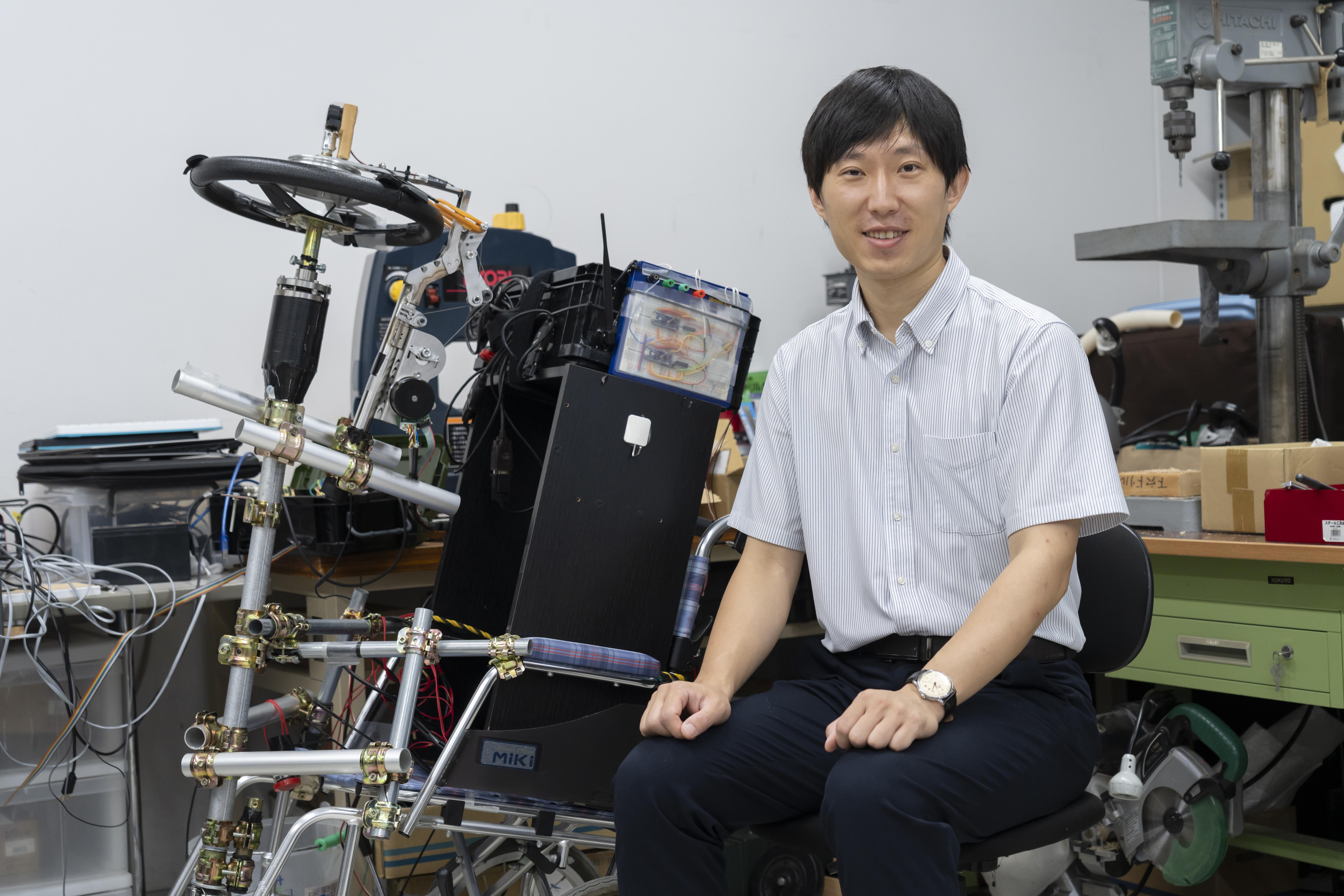
(3) 対人移動支援ロボットの開発
車いすの操作負担を軽減することを目的に、パワーアシスト技術と衝突回避手法の研究を行っています。特に認知機能が低下した高齢者に対し、自然な操作感、安全性が高い制御の統合に取り組んでいます。
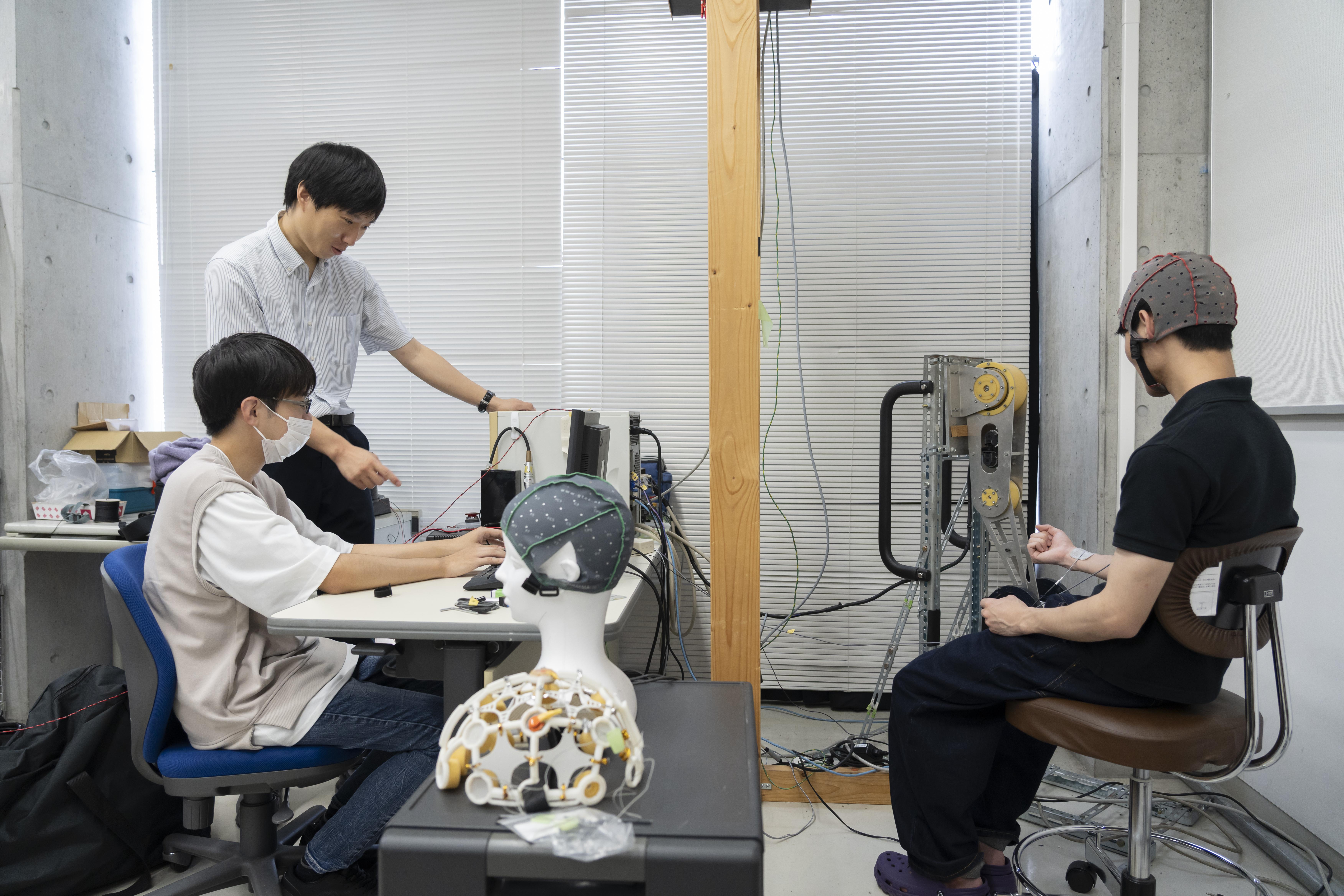
(4) 脳波によるパワーアシスト技術の研究
脳波を計測し、利用者の運動意図を推定することで、身体障がい者の動作を補助するパワーアシスト技術の構築を目指しています。
どのような産学官連携ができるか
本研究室は1年間に2,3件の共同研究を募集しており、以下のテーマに関連する分野を中心としております。
・装着型パワーアシスト装置、外骨格ロボット
・対人移動支援車いす、電動モビリティなど
・自律移動ロボットと制御システム
・脳波、筋電によるロボット制御
SDGs該当番号

