 |
生体機能制御システム 朱 研究室 福祉・医療・産業に貢献する知能ロボット、メカトロニクスシステムの研究 |
|---|
|
生体機能制御システム 朱 研究室 福祉・医療・産業に貢献する知能ロボット、メカトロニクスシステムの研究 |
|---|
![]() 管路検査・作業ロボット
管路検査・作業ロボット
1.開発の背景・目的
環境保護の一環として、廃水または下水の水質を調査する必要があります。Fig.1に示すように、内径200mm、壁に間隔200mmの穴がある下水管は、ごみ処分場の下に埋め込まれ、ごみ処分場の下に漏れてきた汚水を収集します。このロボットは、その汚水が漏れてきた穴を発見し、さらに漏れてきた汚水をサンプリングするという目的で開発されました。
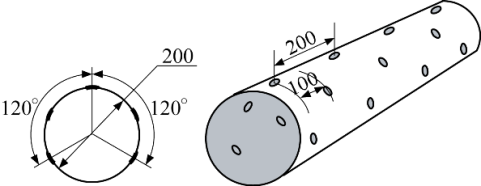
Fig.1 ごみ処分場の下に埋め込まれた下水管
2.ロボットの特徴
このロボットは、管路内部の検査だけではなく、管路内部の操作(汚水のサンプリング動作含む)もできます。後者はこのロボットの最大の特徴です。なぜなら、現在市場に既にある管路検査ロボットは、ほとんど自走車にカメラを載せるだけで、操作機能がないからです。
3.ロボットの構成
このロボットは、自走車、マニピュレータ、制御・駆動部分で構成されます(Fig.2-.4)。
ロボットのスペック:
全長:約 620[mm]、幅:166[mm]、高さ:158[mm]、重さ:24[kg]、移動距離: 200[m] (傾斜4°)
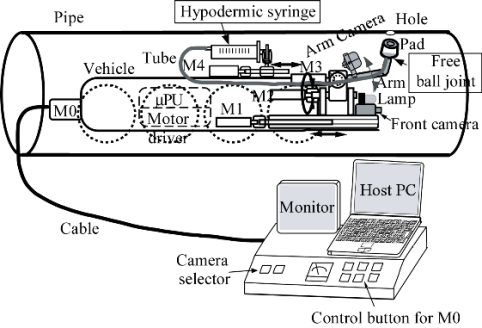
Fig. 2 管路検査・作業ロボットシステムの構成
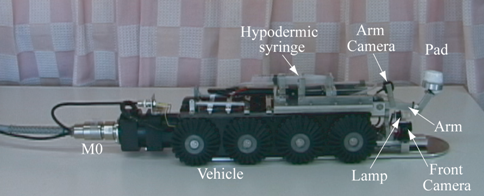
Fig. 3 管路検査・作業ロボットの側面

Fig. 4 管路検査・作業ロボットシステム
4.ロボットの機構
マニピュレータ部分は4関節で構成されます(Fig.5)。
J1: 直動関節; マニピュレータを前後駆動; 0 - 100[mm]
J2: 回転関節; パッドを円周方向に穴に接近させ; ±135[deg]
J3:回転関節;パッドを半径方向に穴に接近させ; 0 to 45[deg]
J4:直動関節; 注射器を駆動し、ゴムチューブを経由して汚水をサンプリングする; 0 - 80[mm];採水容量: 25[ml]
自由球関節: 受動関節; 位置と姿勢の誤差を吸収する。
パッド: シリコンゴム製の円錐台、トルク制御により安定的に穴に押す (J3で駆動)。
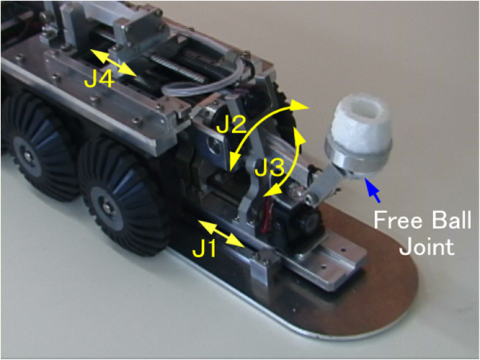
Fig. 5 ロボットの関節
Fig. 6 各関節の動作
デモ動画 mp4 17.6 MB 01'07"
5.現場実験
実験現場(ごみ処分場)と実験の様子をそれぞれFig.7、Fig.8に示します。
Fig.9とFig.10はそれぞれアクリル管内のデモと実際の管路内での実験の様子を示しています。
なお、ロボットのアクリル管内の動作は管路内の動作と全く同じです。

Fig. 7 ごみ処分場:下水管はその下に埋め込まれている

Fig. 8 ロボットが管路に入る前の様子
Fig. 9 アクリル管内のデモ
ロボットの動作は管路内の動作と全く同じです。
(デモ動画 mp4, 40.7 MB, 03'49'')
Fig. 10 現場実験
(実験動画 mp4, 32.0 MB, 02'36'')