 |
生体機能制御システム 朱 研究室 福祉・医療・産業に貢献する知能ロボット、メカトロニクスシステムの研究 |
|---|
|
生体機能制御システム 朱 研究室 福祉・医療・産業に貢献する知能ロボット、メカトロニクスシステムの研究 |
|---|
![]() リリース型マニピュレーション
リリース型マニピュレーション
1.新しい操作手法の提案
対象物を1箇所から別の場所に運ぶ際、従来の操作方法ではpick-and-place(Fig.1)という方法、あるいは大きい対象物や重いものに対してはPushing (Fig.2)という方法が用いられます。

Fig. 1 Pick-and-Place 操作
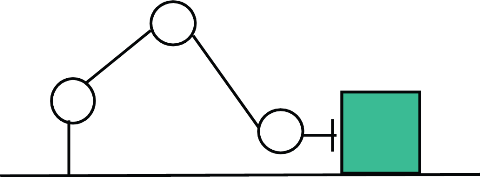
Fig.2 Pushing 操作
これらの操作の欠点として、
(1) 対象物の到達範囲: 狭い (マニピュレータの可動範囲以内)
(2) 操作過程: 遅い
(3) ロボットの構造: 複雑
等が挙げられます。これらの問題点を解決するため、本研究では新しい操作手法を提案し実現しました。この操作手法は、マニピュレータハンドが平面上に置かれた対象物を弾いて対象物に初速度を与え、慣性と摩擦によって対象物を目標位置・姿勢に到着させるという操作です。この方法は、リリース型マニピュレーションと呼ばれます。この操作手法は、従来のpick-and-placeのような準静的な操作ではなく動的なマニピュレーションです。
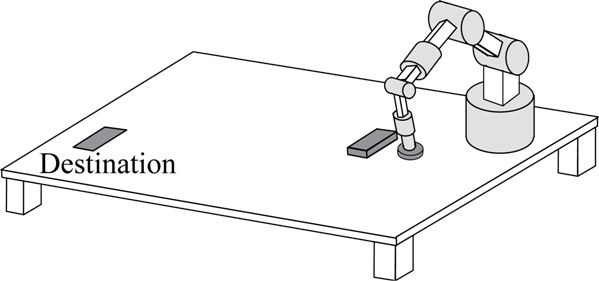
Fig. 3 リリース型マニピュレーション
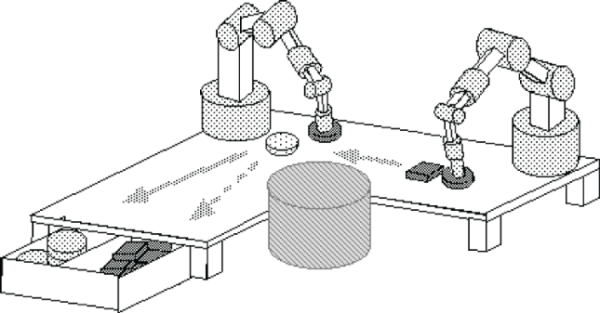
Fig. 4 応用例:リリース型マニピュレーション
2.主な研究成果
(1) 任意形状の対象物に対し、軌跡は直線(回転対称のもの)、または近似的に直線である(他の形状の対象物)。
(2) 対象物の並進運動と回転運動は同時に止まる。
(3) 与えられた初速度に対し、対象物の移動距離・回転角度は近似手法で算出できる。
(4) 逆に、与えられた目標位置・姿勢に対し、必要になる初速度は近似手法で算出できる。
(5) 2つの学習制御手法、LCBCC(Learning Control Based on Convergent Condition:
収束条件に基づく学習制御)とLCBOP(Learning Control Based on Optimal Principle:
最適則に基づく学習制御)を提案し、実機で対象物の止める位置・姿勢の精度を向上することができた。
3.実験
(1) 実験システム
実験装置はFig.5に示すように、川崎重工製の産業用マニピュレータJs-2 は、RS232Cを経由しパソコンで制御され、対象物を弾く。マニピュレータのハンドはアルミ製の円盤である。台面は紙で覆われており、カメラ1は衝突モデルを修正するため、弾かれた直後の対象物の初速度を測定し、カメラ2は各試行後の対象物の停止位置・姿勢を計測する。なお、ビションシステムで対象物の停止位置・姿勢の測定は朱の独自開発した方法で行われた。
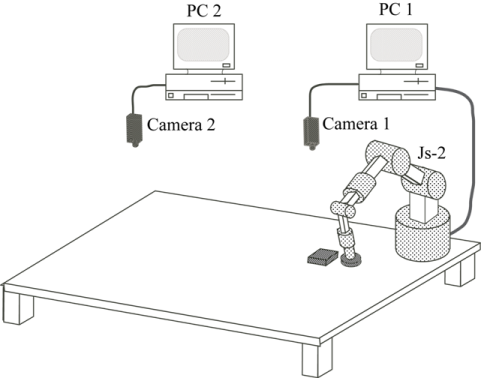
Fig. 5 リリース型マニピュレーションの実験システム
(2) LCBCCの実験結果
LCBCCの学習制御手法は、長方形とL字型の対象物を目標位置・姿勢に到着させる実験です。
4, 5回の試行後, エラーは10-30%の初期誤差から5%以内に減少しました。
長方形の実験ビデオ
mp4 23.2 MB 01'29''
対象物の止まる位置・姿勢を注目してください。
L字型の実験ビデオ
mp4 30.2 MB 01'57''
対象物の止まる位置・姿勢を注目してください。
(3) LCBOPの実験結果
学習した経験また知識を利用して、対象物の停止位置・姿勢の精度を更に向上する目的は、LCBOPの学習制御の発想です。検証実験として、LCBOPの学習制御手法で、3つの同じ長方形を異なる位置に一列に並べるタスクを実行しました。結果が下の動画です。
実験結果として、位置誤差を1%以内に抑えることができました。
実験ビデオ
mp4 35.0 MB 02'16''
対象物の止まる位置・姿勢を注目してください。